
Se você trabalha ou estuda engenharia com foco em sistemas embarcados, automação, instrumentação ou navegação, precisa conhecer o Filtro de Kalman.
Essa técnica é usada para resolver um dos maiores desafios em engenharia de sistemas dinâmicos: estimar com precisão a posição, velocidade ou orientação de um objeto mesmo com medições imperfeitas.
Sensores como acelerômetros, giroscópios e receptores GPS são fundamentais para aplicações modernas. Mas todos eles têm limitações:
- O GPS pode apresentar erros devido à interferência, perda de sinal ou atualização lenta.
- IMUs (Unidades de Medição Inercial) acumulam erro ao longo do tempo.
- Sensores de campo ou instrumentação industrial capturam ruídos do ambiente.
A pergunta é: como obter uma estimativa precisa a partir desses dados imperfeitos? Filtro de Kalman.
Como o Filtro de Kalman resolve isso?
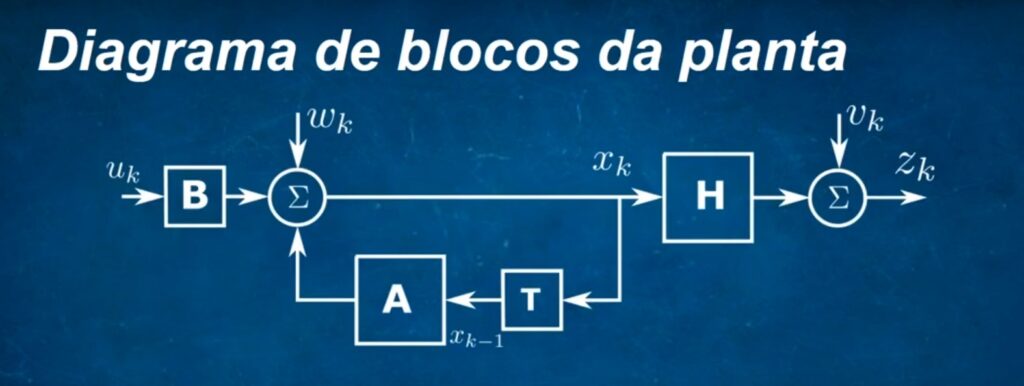
O Filtro de Kalman combina dois mundos:
- Modelo matemático do sistema (dinâmica)
- Medições ruidosas dos sensores
A cada instante, ele faz uma previsão com base no modelo e uma correção com base na medição real, ponderando conforme o nível de confiança em cada um.
Aplicações diretas do Filtro de Kalman
🚁 Navegação Inercial Assistida por GPS
- Fusão de GPS com IMUs para obter posição contínua mesmo com perda de sinal.
- Usado em drones, veículos autônomos e aeronaves.
🧭 Estimativa de Orientação
- Integra giroscópios, acelerômetros e magnetômetros para fornecer yaw/pitch/roll confiáveis.
- Aplicado em plataformas móveis e sistemas marítimos.
🛠️ Instrumentação Inteligente
- Suavização de leituras de sensores industriais (pressão, nível, vibração).
- Estimativa de variáveis não diretamente mensuráveis (ex: fluxo, torque).
No primeiro vídeo da série, abordamos:
- A teoria por trás do Filtro de Kalman, com clareza e sem complicação
- Os conceitos de estado, ruído, incerteza e modelo de sistema
- Por que essa técnica é indispensável para quem projeta sistemas que dependem de sensores
📺 Assista agora e entenda a base que sustenta aplicações críticas:
Dominar o Filtro de Kalman é mais do que um diferencial — é uma necessidade para engenheiros que trabalham com sensores e navegação.
Este é o primeiro passo da série. Em breve, mostraremos como implementar na prática.
Inscreva-se no canal no YouTube e acompanhe os próximos episódios.

